TaRDIS proposes a validation strategy supported by pilots deployed on 4 real use cases, as described next. For each individual use case, the background and main scenarios highlight what the overall context is, as well as the benefits from the use cases perspective driven by a potential TaRDIS deployment.
Multi-level smart charging
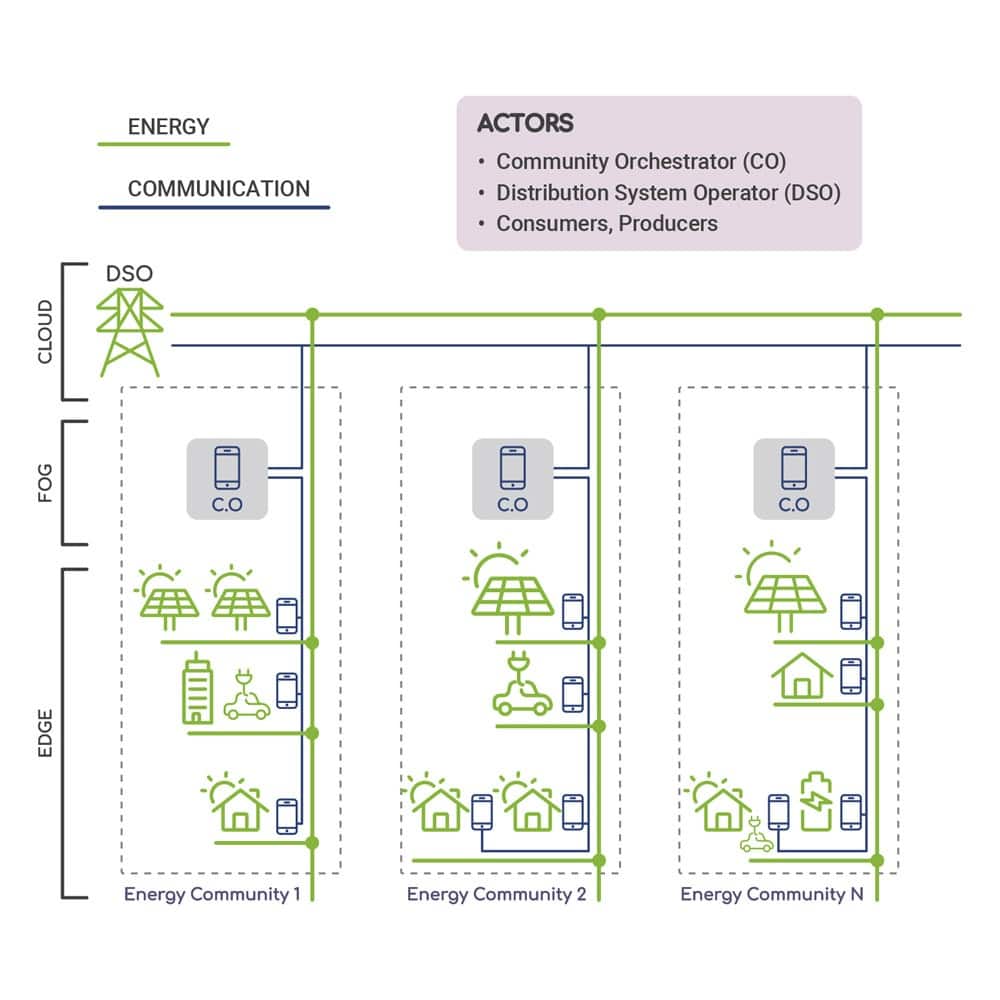
The rising number of Electric Vehicles (EV) is a huge concern for Electric Distribution System Operators (DSOs) across Europe since they represent an unforeseen load on the grid. Grid reinforcement becomes risky as investment needs to be placed where demand naturally grows. To solve this charging problem, the use case proposes multi-level smart charging, divided into three core layers: the Edge (HEMS, EV chargers); the Fog (end-users community or building level aggregator); and the Cloud (centralised controlling systems, SCADA).
Key Innovations:
- The introduction of a multi-level smart charging architecture, from edge to cloud.
- Optimised orchestration of edge devices (EV chargers) based on Federated Reinforcement Learning
- Increased resiliency of the energy grid through multi-level optimisation (Residential, Community, Global).
Privacy-preserving learning through decentralised training in smart homes
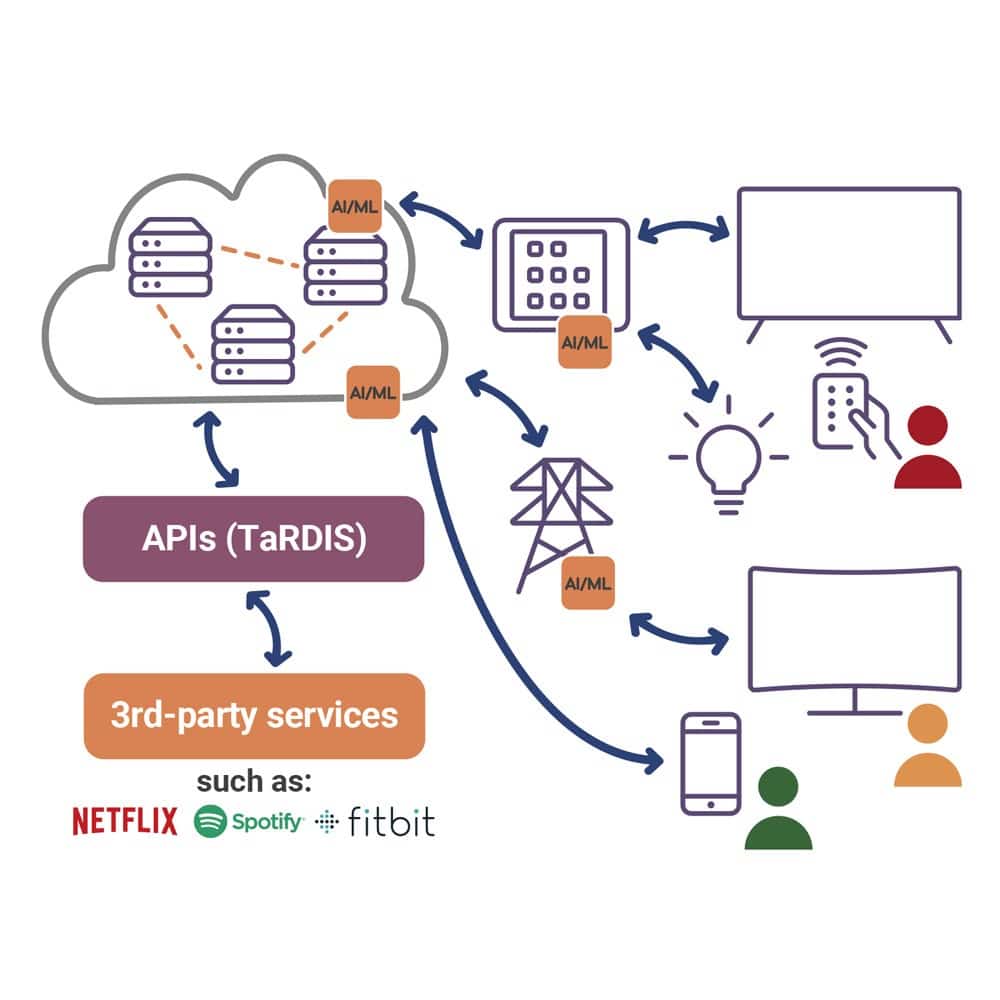
Federated learning enables smartphones to train classical deep learning models in a decentralised fashion ensuring that data resides locally on devices with only the trained models being shared and globally updated. In this use case, TID will develop a privacy-preserving federated learning framework that can work in a hierarchical fashion. This will be deployed and evaluated on the edge and other hierarchical computing environments typically found in telco settings.
Key Innovations:
- Introduction of hierarchical federated data training in a telco infrastructure.
- Injection of differential privacy techniques at each of the layers to bolster privacy aspects in data usage.
- Applicability of TaRDIS-like toolkit for future decentralised application developments.
Distributed navigation concepts for LEO satellite constellations
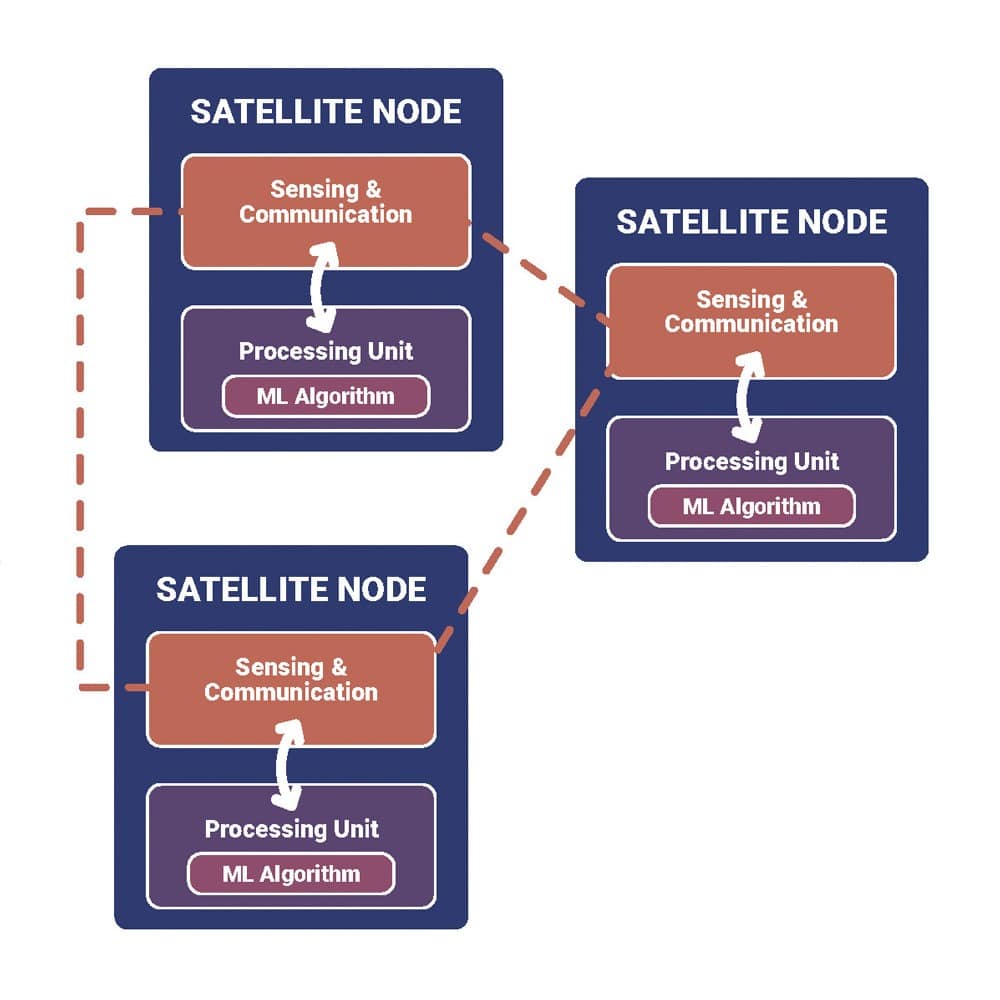
One emerging trend in the Space Industry is the provision/commercialization of products and services based on current and new swarm satellite networks. In this sense, there is a growing interest in Low Earth Orbit (LEO) constellations (i.e., swarms) of satellites. LEO communications and PNT (Position, Navigation and Timing) services are emerging (Starlink, Iridium, OneWeb).
One of the main concerns in operating large numbers of satellites is how to reduce costs, minimising tasks typically performed by an operator and/or ground stations that can be tackled by developing and expanding current solutions to have a higher level of autonomy within the satellite system.
Key Innovations:
- Capacity to perform distributed on-board ODTS navigation in LEO satellites versus the classical ODTS that currently is mainly performed on-ground in a centralised manner.
- Autonomous navigation and timing: satellites with on-board, real-time navigation, and lower dependency on Earth/ground stations, to keep the global navigation satellite system functional during extreme conditions.
- Autonomous navigation technology with inter-satellite links.
- Achieving the previously mentioned goal while minimising the consumed computational power.
Highly resilient factory shop floor digitalisation
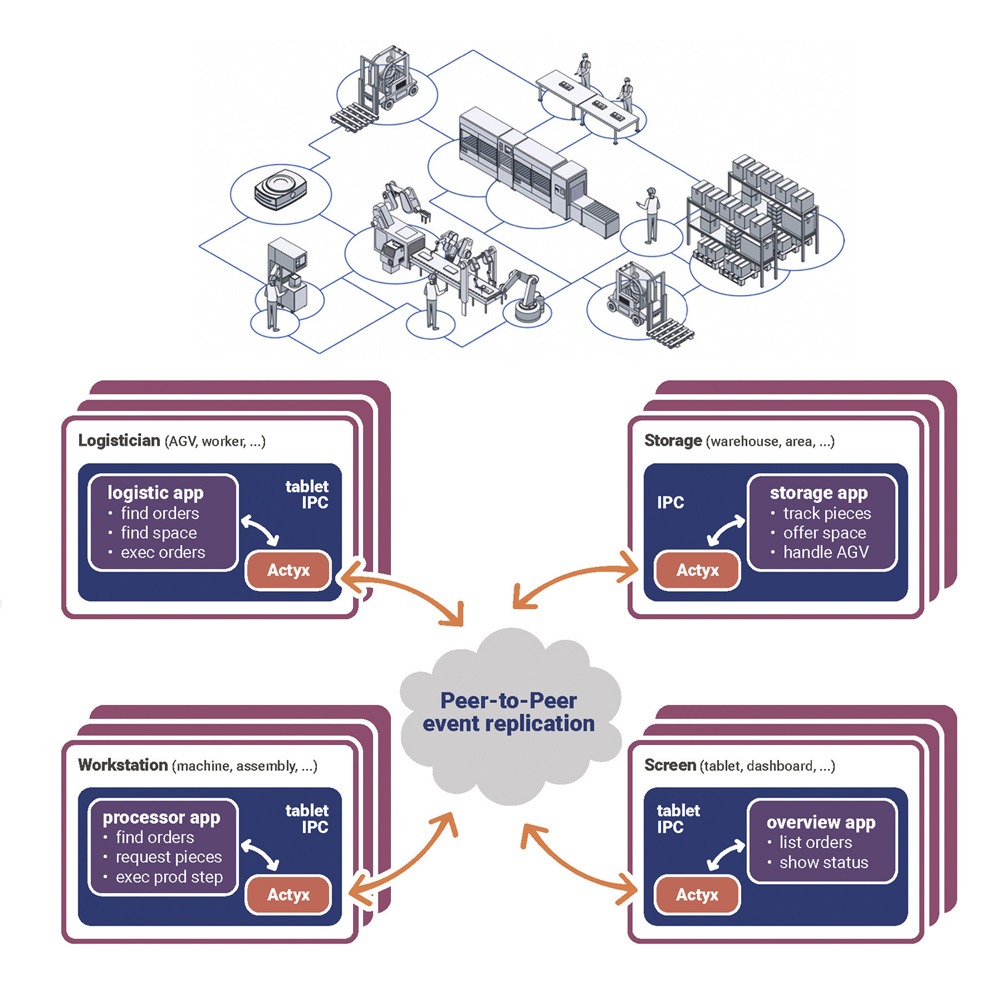
This use case will be implemented in a real factory (an ACT customer) and comprises several production lines, a warehouse, an intralogistics fleet, an order management system, a setup and repair management system, and a business intelligence (BI) system.
Each production line has processing capabilities for certain kinds of input materials and manufacturing steps (like milling, drilling, turning, cutting), which are provided in collaboration between one or two robots and a machining centre: a robot picks the input material from the input buffer, places it into the machining centre, then the processing steps happen, followed by a robot taking the processed workpieces out of the machining centre and putting them into the output buffer area.
Key Innovations:
- A novel programming model based on persistent event logs that is coordination-free (i.e., highly resilient and available), eventually consistent, and can express competitive tasks like an inter-node bidding process while allowing the programmer to reason about swarm behaviour and avoid undesirable protocols (e.g., leading to deadlock or leaking private information).
- The programming model is integrated with collaborative inter-node data structures (like CRDTs) for non- transactional data handling as well as powerful querying capabilities on the event logs, which also serve as an audit trail.
- Adaptive partial data replication between edge nodes that upholds redundancy constraints while not requiring central coordination or homogeneous resources across nodes.
- Runtime monitoring of system behaviour validated against the specified interaction protocols, to protect data integrity and summon human oversight in case of problems.